最近理想汽车发布了其OTA 5.0的一些升级内容,总的来讲,理想的彩电冰箱大沙发又配上了先进的智能驾驶,潮流的GPT以及车内电脑。根据理想汽车现在的成绩以及影响力,理想发布的东西确实值得研究一下。

本次理想OTA 5.0的内容,我们将分为两大部分来分享,第一部分是智能驾驶,第二部分为智能座舱以及电子电气,本文将在主要分享一些关于理想OTA 5.0的智能驾驶。
- 理想汽车OTA 5.0智能驾驶相关功能理想汽车OTA 5.0智能驾驶背后的技术方案和亮点
希望能给大家带来一些关于理想智能驾驶到底怎么样的一些观点和信息,同时看看是否能窥探智能驾驶发展的一些思路和方向。
理想汽车OTA 5.0智能驾驶相关功能
理想汽车关于智能驾驶的小作文标题分别为:全国都能开得智能驾驶,这个主要是表达在目前智能驾驶进城背景下,理想汽车在领航辅助(什么是领航辅助点击之前文章《浅谈高阶智能驾驶-领航辅助的技术与发展》)方面的城区领航辅助开城速度不错。
全球都能开的辅助驾驶,这个辅助驾驶主要是指LCC自适应车道居中辅助驾驶,或者特斯拉蔚来等说的pilot功能,主要表达的是车道识别能力强,例如雪地,无车道线的道路边缘能够识别,另外还有红绿灯识别能力强。
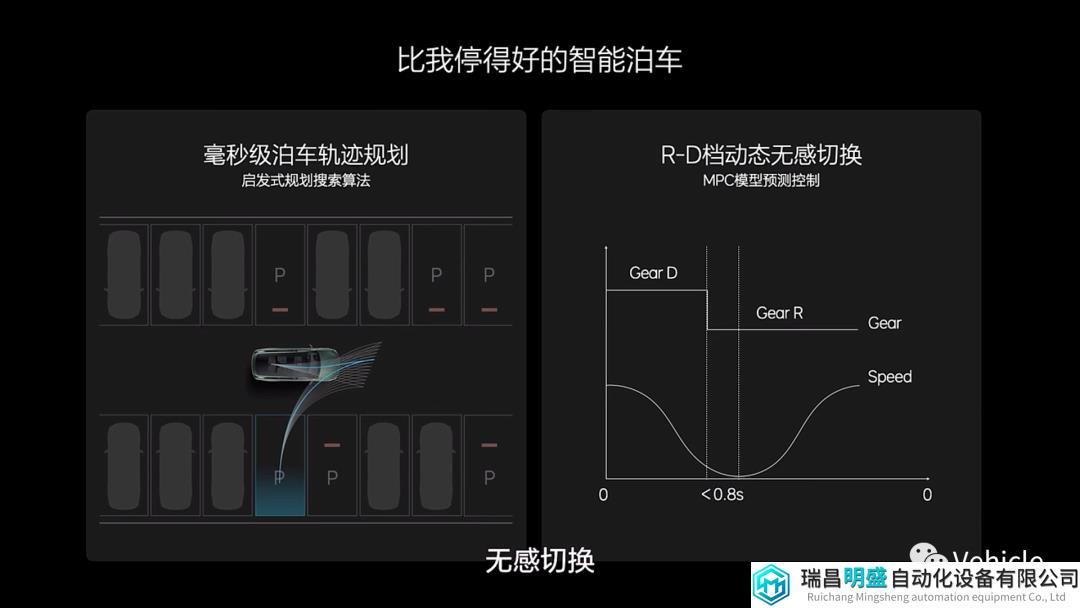
比我停得好的智能泊车,这个主要是指泊车相关功能(泊车相关功能也可以点击《关于自动驾驶泊车-市场功能,硬件和技术》),主要是停车速度等。
重大事故少的主动安全,主要是指AEB主动防撞等功能。

高阶领航辅助,理想喊的口号是全国都能开,也就是包含高速,环路以及城区道路的领航辅助。
理想宣传它这个功能的子集有:变道超车,出入匝道,按照道路限速行驶,施工场景避让,拥堵路口博弈变道,城市路口通行,城市场景避让。其实这些功能子集依然比较模糊,例如城市场景路口通行,包含了十字路口,丁字路口,不对齐路口,环岛路口等等,理想现在全部能处理吗?显然大大的问号,但消费者可能觉得全部都能。不过理想按照场景分类的方式确实比较好的推进研发满足客户使用场景需求。
另外理想表示其全场景领航辅助能开110个城市,其实已经透露当前智能驾驶的无图都是无高精地图,估计都无法摆脱智驾的轻量化地图,要不为什么不喊全球都能开,所以应该还有地图成分在里面,但这个地图是什么?文章下一部分将分析。
驾驶辅助,他的基础的功能是自适应巡航的车道居中,以及指令变道,施工场地的减速避让。理想产品比较厉害的是依然将这个功能的场景使用,分为两个部分,根据场景定义功能子集:
-
- 高速场景,支持自主超车变道。城市场景,路口场景响应信号灯,合流分流路口自主选择车道,不过合流以及分流自主选择车道,需要坚持一个原则是一直向前走还是其他,目前不得而知。
这个功能其实是一个真正主要依靠视觉,激光雷达等传感器来实现的,当然也有不少背后使用地图的方案,例如华为的方案至少2.0方案之前的都参考地图行驶。如果单独使用传感器的方案,这个功能主要考验的是传感器识别道路的能力。理想表示他能够识别没有车道线的水泥路,积雪的路面,应该是除了利用传统摄像头识别车道线,还利用激光雷达识别车道边界,从而实现对没有车道线的车道识别和作用。
泊车辅助分为两大块,自动泊车以及代客泊车AVP。
自动泊车,主要是车辆在车位旁边,泊入车位。他主要分三个功能:
-
- 基础车位泊车,人在车上选好车位让车辆泊入进去
-
- 离车泊入,人不在车上,下车用手机开启泊入车位直线召唤,人不在车上,用手机控制车辆前后进出车位。
基础泊车里面有不少细节,比如不同的垂直车位,平行,斜列,有参考车,有柱子等等,场景也多,但大家很少去广告宣传了,他属于kano模型里面必须要有,比的是例如泊车快,好等性能了。所以理想在发布会中演示了其自动泊车的泊入速度,当时停车的车位是一边有车和有柱子的垂直停车位情况,理想L9泊车用时37s,能做到30多s的泊车都还行,但也不算顶流,目前泊车顶流还是华为的泊车,应该最好做到30出头。
至于理想讲到的动态换挡无感切换,说实话开了这么多智能电车,除了2021年前的一些车有感,其他的都无感,所以我没有get到里面的点。
代客泊车AVP,其实理想用这个词,我能说不厚道么,如果AVP的全称是Automated Valet Parking,当然解释权归使用方理想,那么这个词最早是博世喊出来的,是一个L4的功能,也就是前段时间华为和小鹏demo的,到了停车场入口,人下车,车子自动开到停车位,之后可以再无人开出入口,接上乘客。
通过理想的宣传视频以及描述其实可知,OTA 5.0理想的代客泊车AVP就是小鹏2021年就有的跨层记忆泊车,发布会上宋紫薇表示可以跨十层,其实只要解决了跨一层,所有的技术方案都是一样的,另外通过视频可以看到下坡道的时候,车速表显大概是4kph左右,当然那个坡道确实很弯,平面道路车速大概是10kph。其实通过这些情况来看,理想的泊车应该和小鹏之前的方案差不多,并没有发现特殊,另外通过性能来看应该是不及华为,华为泊车的速度等都是老司机。不过理想的记忆泊车在记忆行车的时候可以倒车,这个倒是挺新颖。
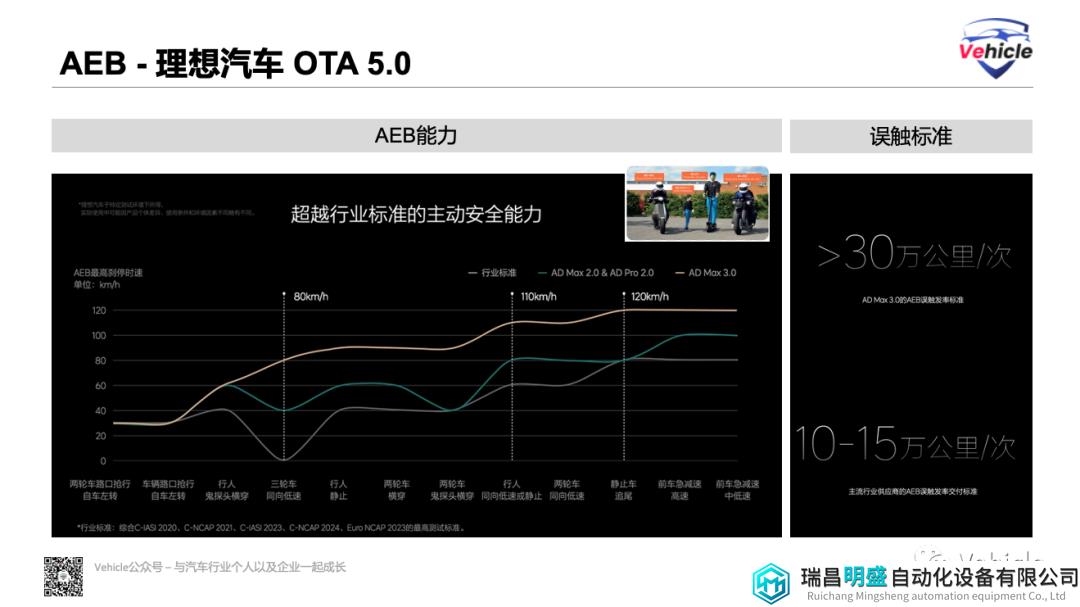
主动安全,AEB理想还是表达的比较清楚,目前主动安全主要是基于车辆以及VRU也就是人,自行车,三轮车进行紧急刹车或者减缓碰撞的。所以,不要拿纸箱其他莫名鬼怪的东西来测试,很多不是设计的ODD,不过理想也表示有华为也有的通用障碍物识别以及制动,我们之前文章《遥遥领先的华为智驾硬件以及背后的GOD和RCR算法》讲到过华为能识别通用障碍物,所以通过对功能描述来讲理想的AEB也是比较领先。
另外理想还讲到一个比较良心的AEB指标,这就是误报以及漏报率,有些汽车虽然AEB测试百发百中,性能强大,但是你想某天高速上一个误报来个紧急刹车,那体验估计够吓死,甚至还可能酿成车祸。
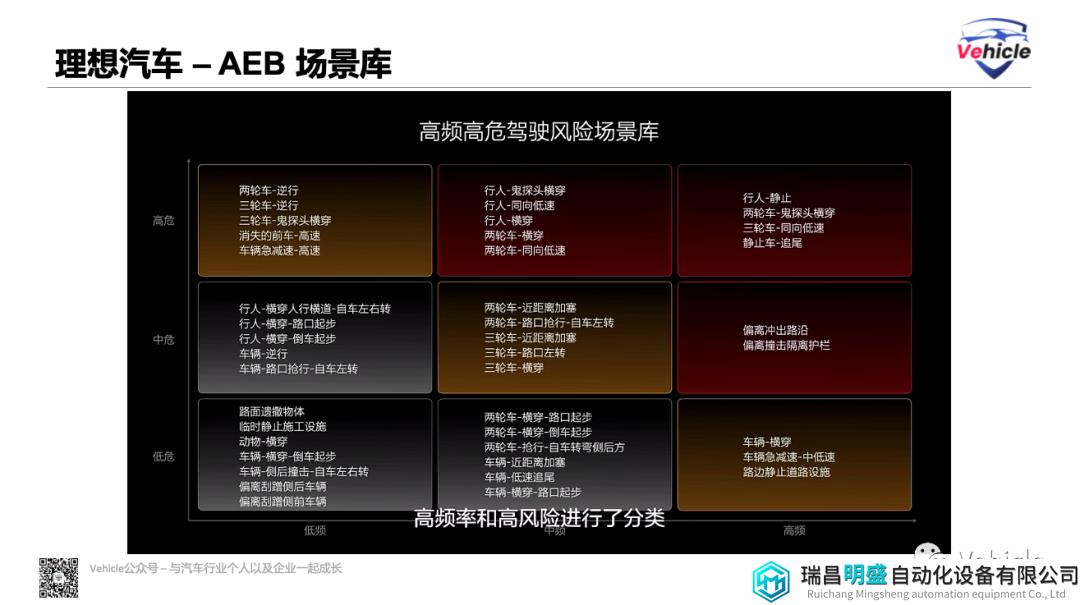
另外一个理想做的好的是,AEB场景库,理想的产品经理们都很棒,将场景通过危险度以及频率来分类,这样产品执行团队就可以按照优先级来执行完善,实现以客户需求为导向的设计开发。
最后以上讲的功能是理想最高配的AD Max 3.0,理想还有一套比较平民的AD Pro 3.0,他主要的差异是没有了城区领航辅助以及“AVP泊车”,另外就是没有激光雷达的通用障碍物识别以及没有车道线的车道识别。
总的来讲,理想的智能驾驶功能,应该离第一梯队的华为和小鹏还是有一些差距,当然理想汽车非常能够定义产品,具体的使用需要有理想的车子长期测试才能得出结论,很多时候功能性能和体验的好坏是两回事。
理想汽车OTA 5.0技术方案以及亮点
理想的智能驾驶硬件系统是分两套,两套传感器的差异应该是有没有激光雷达雷达,处理芯片用的是哪家来区分;摄像头数量应该一样多都是前2,侧4,后1个,当然另外4个环视。两套硬件的主要差异是:
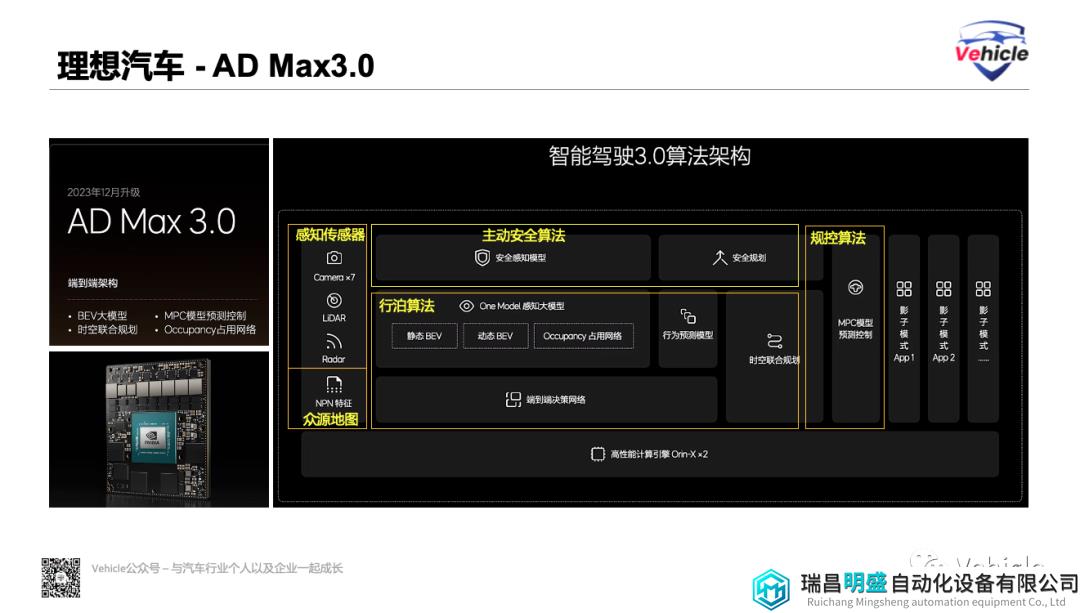
- 一套是基于地平线J5芯片平台的平价版本,用在Pro,Air车型上面,叫做AD Pro3.0。另外一套是基于英伟达Orin芯片平台的高阶版本,外加激光雷达,用在Max车型上面,叫做AD Max 3.0。

两套方案都将采用视觉BEV大模型,目前基本上大家谈高阶一点的智能驾驶视觉算法,基本上都被BEV统治了,另外采用英伟达Orin芯片方案的使用Occupancy占用网格算法,这个我之前文章《智能驾驶-城市领航辅助必备的BEV以及Occupancy networks》分享过占用网格算法很吃算力,所以现在基本上是英伟达大算力芯片的专属。
下图为理想AD Max 3.0算法结构,主动安全的算法应该是传统可控的目标物识别为主,行泊算法就是上面讲到的BEV类。
熟悉我们之前智能驾驶文章的朋友可知,高阶智能驾驶领航辅助进城最痛的点就是地图,而地图的很大作用就是告诉车前方的道路,但由于高精地图测绘成本,时效性以及政策影响,是智能驾驶进城最大的拦路虎。现在随着AI视觉算法越来越强大,其实不需要之前有参考线的高精地图,只需要道路拓扑也就是路口关系即可。
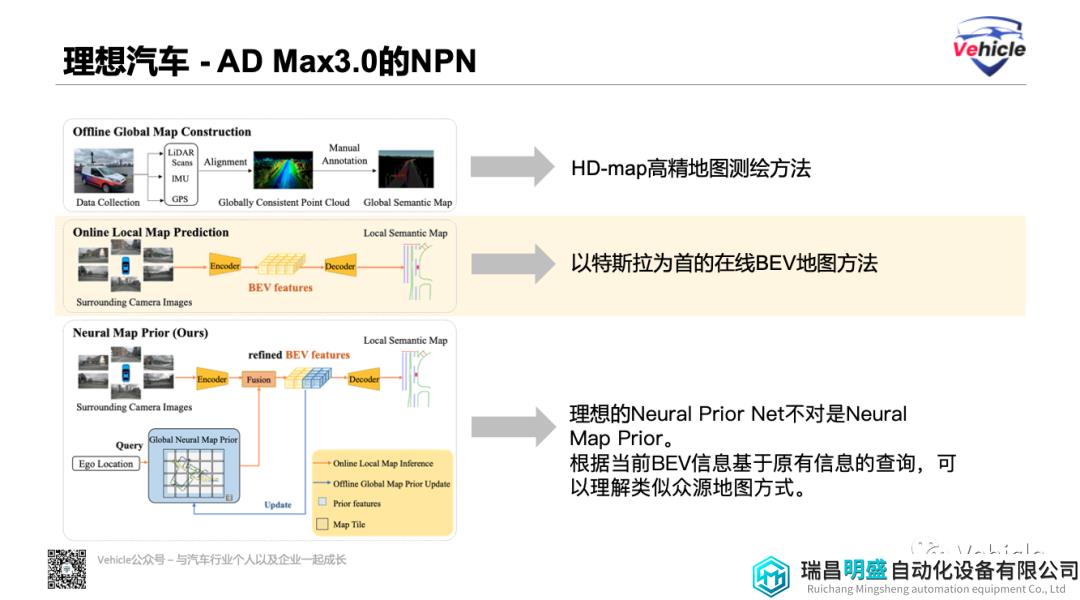
对于地图中难以推测的道路路口,理想汽车引入Neural Prior Net(NPN,神经先验网络),通过云端大模型对复杂的路口特征进行提取,提取的东西应该就是地图信息,在智能驾驶中当车辆经过路口时与车端的实时BEV特征融合,这样就增强车端在路口等道路时候的实时感知,熟悉我们之前文章《去高精”不是“去地图”,而是“去图商”》的朋友可能明白,这个方式应该就是之前提到的众源地图。利用NPN特征在云端大模型持续自动化生成地图信息,这样城市领航辅助的可用范围也将不断扩展。
对于车道信息中另外一个较难的是交通红绿灯。理想表示其采用信号灯通行意图网络TIN(Traffic Intention Net)来解决,理想表示其TIN是“端到端”的模型,也就是传感器识别到车辆执行器的决策输入。理想智能驾驶VP郎咸朋表示在NPN特征覆盖的训练过程,也是TIN网络迭代的过程。收集路口NPN特征的同时,也在学习和训练TIN过路口的能力。所以理想应该是众源地图,然后在道路拓扑关系图中也标注了红绿灯位置以及关系图。后续理想的规划是,将BEV大模型(包括NPN+TIN)跟规控模型打通,实现完整的端到端,即从传感器到执行器。
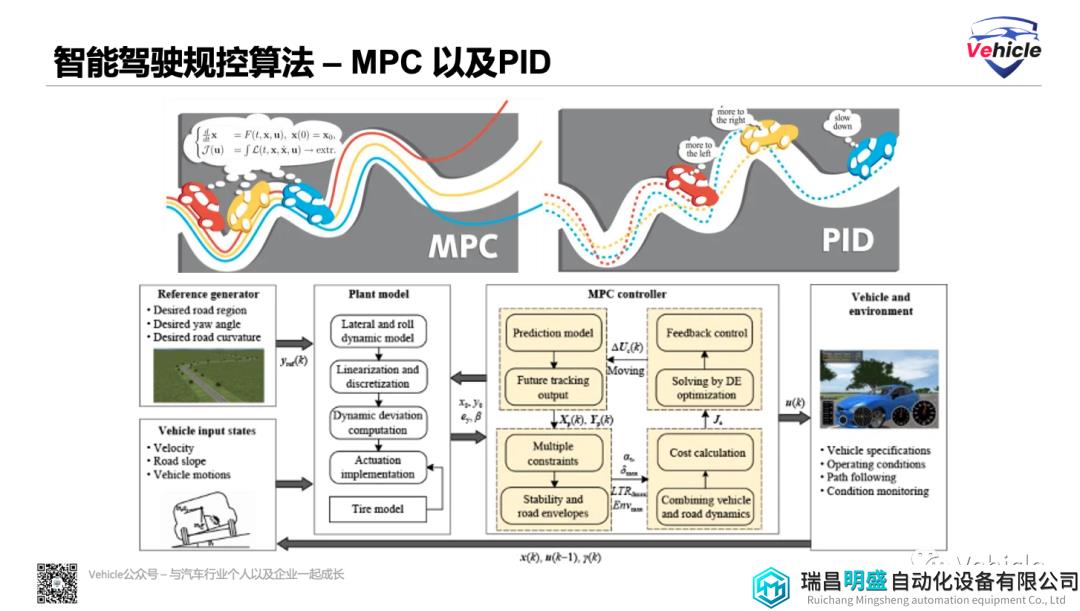
理想此次宣传的另一个是MPC(Model predictive control)规控算法,因为车辆路径规划是多因子影响,所以一般需要构建多个约束以及车辆和道路动力学的集成模型。例如道路曲率和倾斜因子需要考虑,以准确描述其横向和侧倾动力学,还有侧滑、侧翻和车辆包络线等用作多重约束,还需要根据道路以及交通情况去规划控制,最后传感器以及执行器都有延迟。
工业控制行业一直采用经典的PID(Proportional, Integral, Derivative) 也是控制理论中使用的一种流行算法。但对于 PID 控制算法来说,克服延迟是一项艰巨的挑战,如下图所示,PID很难做到柔顺的路线控制。但是模型预测控制MPC可以很好地适应,他可以根据多重因子构建模型,还可以添加延迟因子,最后可以实现更加柔顺的控制,表现为驾驶时候方向盘不会锯齿形调节或者过多的调节,车辆轨迹更加平滑和控制平顺,也就是老司机感觉。
理想采用的MPC算法,但其实在工业控制领域MPC 并不新鲜,它已经存在了40 年,另外对于规控算法,业内还有更加潮流和先进研究的是强化学习算法Reinforcement-Learning Control Algorithm,也有不少论文表示强化学习算法在预测、跟踪和更快响应环境变化的能力方面优于 MPC,不过强化学习算法很难去验证。不过通过观看不少人测评理想OTA 5.0的反馈,这个控制算法应该不错,很有老司机的感觉,至少比理想之前的顺滑了很多。
总结
理想做产品的能力确实强,首先智驾两套方案的选型以及定位,都非常明确,在方案还在持续变革发展的时代,押宝不同供应商和技术路径,互补学习;在产品方面,形成高低方案,从客户感知强的角度出发。
至于智能驾驶算法层面基本上演化趋势还是朝着特斯拉的方向走,BEV+Transformer+occupancy等,另外就是大模型端到端的趋势,不过理想走到那一步应该还有些距离。
*未经准许严禁转载和摘录-获取参考资料方式:
- Neural Map Prior for Autonomous Driving – Xuan Xiong1 Yicheng Liu1 Tianyuan Yuan2 Yue Wang3 Yilun Wang2 Hang Zhao2,1* 1Shanghai Qi Zhi Institute 2 IIIS, Tsinghua University 3MIT