作者 | 朱世耘,编辑 | 章涟漪
“接下来的竞争是高手过招,你我之间在技术上没有大的差距。”自动驾驶技术产品提供商智驾科技MAXIEYE创始人周圣砚向《赛博汽车》说道:“高手都是对技术有追求的,拼得不是做些假的东西,而是对产品和场景的定义。”
智驾科技MAXIEYE对技术的追求落地为一套闭环的商业模式:MAXIPILOT®2.0高中低三款高阶智能驾驶辅助系统方案,全部使用BEV Transformer技术栈,仅用1560100Tops的算力实现轻地图NOA量产,并通过体系内的数据闭环,为城市记忆行车的功能场景落地提供“燃料”。
“技术重构使得自动驾驶的终局逐渐清晰,资本和市场也在由原来的百花齐放和百家争鸣,逐渐向具备核心技术的少数玩家收缩和靠拢。”周圣砚表示:“那些没有掌握核心技术的自动驾驶中间商扮演者的角色,接下来的生存空间将已荡然无存。”
01、15Tops也用上BEV
MAXIEYE的MAXIPILOT®2.0平台,覆盖从单V(牧童Monotogo™解决方案)到多V(5V、6V、9V及以上-跨越低中高算力的行泊合一域控方案)的全平台解决方案矩阵,满足城市L2增强、高速NOM(Navigate on MAXIPILOT®)、城区NOM、行泊合一、记忆行泊车全场景应用。
其中,“牧童”(MAXIPILOT®2.0 Lite)是由15Tops算力芯片和1个前视摄像头组成,作为千元级别的方案,可适配20万元以下车型的智能化升级需求,支持轻地图高速NOM(Navigate on MAXIPILOT®)应用落地。
高性价比的高速NOA系统下放并不新鲜。
深蓝SL03所搭载的前视一体机方案,通过双征程3(10Tops),配合1个800万前视摄像头、5个周视摄像头和5个毫米波雷达,组成6V5R的方案,可实现轻地图的高速NOA功能;第三代荣威RX5的高速NOA方案则是三颗征程3(15Tops)配合6V3R的传感器方案来实现。
但牧童的“想法”却与上述方案不同。在同样的低算力和单V感知的硬件方案上,牧童业内首次用上了BEV技术栈,成为业内唯一支持BEV部署的前视一体机高性价比算力平台方案。
与由规则算法建立可行驶区域的方法不同, BEV Transformer最大的优势在于赋予系统“记忆力”和“脑补”的能力,以及数据驱动的进化能力。在BEV的加持下,除高速领航的能力外,牧童还能够解决当下L2系统在路口容易退出/道路拓扑变化体验不佳等城市高频场景体验不连续的产品痛点。
02、统一技术栈,数据开城
在低、中、高平台上使用统一的青云BEV技术栈,不仅是为了入门级产品也有好体验,更重要的是打造MAXIEYE的商业闭环。
牧童之外,MAXIEYE此次发布的产品还包括60Tops算力+5R6V的中算力平台MAXIPILOT®2.0 Pro,单SOC实现行泊一体,支持高速领航和记忆泊车;100Tops算力加nR9V传感器配置方案MAXIPILOT®2.0 MAX,支持轻地图拓展城区领航辅助驾驶方案,同时可选前向激光雷达,作为城区视觉冗余的多重保障。
Lite、Pro和MAX三个版本可形成闭环,为城市领航、通勤模式等高阶智驾功能提供最重要的数据“燃料”。
Lite所适配的20万元级以下车型,在整体乘用车市场中占比最大,且Lite追求覆盖用户70%以上的应用场景。最大规模的车型和应用场景意味着最大规模的数据池。基于数据驱动算法的Lite,为在主流量产车型中收集智驾数据提供了技术基础。
尽管只有单V,但Lite可以从中提取关键路口和特殊道路拓扑的BEV特征,为Pro和Max版提供重要的城市数据。而且因为BEV特征以矢量化,而非原视频的方式存储,所以无需大量的存储空间。
Pro则在BEV基础上,同时支持占用网络的部署,结合自身和Lite收集的BEV特征,输出特征地图(DREM-Deep learning REM)并以合规的方式上传云端,与Max版进行海量的数据共享,共享BEV特征提升特定场景下的功能表现,高速拼接起大范围的特征地图助力开城。
在此基础上,MAXIEYE提出了“记忆共享=城市NOA”的BEV新应用创新范式。
MAXIEYE的青云BEV架构可实现横向拓扑精度5公分,纵向拓扑精度误差1‰的精度输出,稳定性趋近于真值。配合导航算法,青云BEV架构可支持一次性完成自动化建图记忆,已打通首次行车、再次记图、三次激活的智慧化记忆行泊车功能应用。90%以上场景可支持实现两次行车后记忆功能激活。
因此,搭载青云BEV架构的Lite,能够帮助车厂以80%的规模化量产方案为基础,构建20%高配方案所需要的核心场景数据,彻底打通“低阶赋能高阶”的经济且有效的开城路径。
03、架构、基建与模式加乘
值得注意的是,MAXIEYE的这套BEV应用范式并非与其硬件方案进行强绑定。

智驾科技MAXIEYE在产品之外,还发布了“启明星计划”,面向全行业开放BEV感知标准件。支持软硬解耦,实现标准化工具链、标准化规控接口、标准化ISP。通过敏捷的算法移植能力,可支持在6个月内实现高效跨平台开发需求。“我们向行业汽车出行全产业链开放第一个感知的标准件,启明星计划将最大程度地激活汽车产业链上下游的生态。”周圣砚表示。
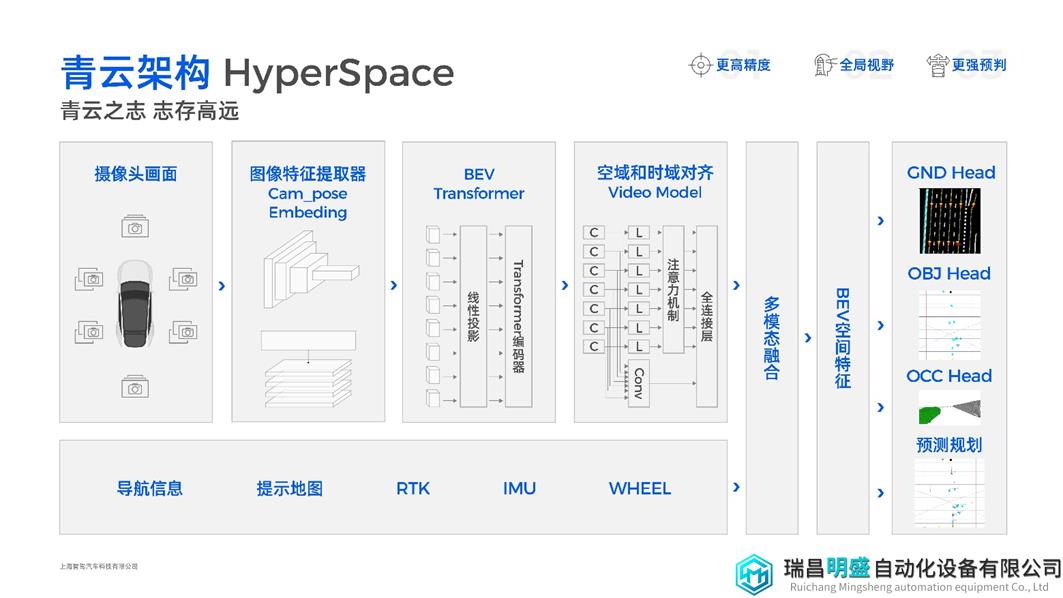
在这套BEV感知标准件背后,是MAXIEYE的BEV平台架构-青云Hyperspace,一站式融合道路拓扑、目标轨迹、占用空间三大网络。
青云BEV架构能够在前向150米,后向100米的范围内,实现横向5公分,纵向千分之一的感知精度;能够识别包括车流、道路方向类信息等100多种属性,满足轻地图领航的功能需求;通过加入时序信息,青云架构能够在遮挡场景中,最大化还原道路拓扑的完整性。
纯视觉的占用网络,是通过将周边环境切分为精度小于10公分的网格,对其进行运动和静止的区分,强化对通用障碍物的检测能力。
在规控方面,目前青云BEV架构仍以规则算法为主。但周圣砚表示,MAXIEYE已打通感知系统与生成式预测算法的通路,加大规控模块中数据驱动算法的比例,将是未来工作的重要部分。
支撑青云BEV架构的是海市MAXI-DI数据智能架构,其全维覆盖量产数据闭环MAXI-DATA、真值系统MAXI-TRUTH SYSTEM、MET-TOOL全流程闭环测试开发工具链,以及仿真极限场景构建。
其中,MAXI-TRUTH SYSTEM真值系统能够实现4D场景构建、自动化数据处理和训练。为青云BEV算法架构提供高效的底层技术支持;MET-TOOL全流程闭环开发工具链,可助力客户量产项目研发效率提高20倍,测试效率提升至少10倍,大大缩短项目量产上线周期。
而基于两年的前装量产部署经验,已实现超3亿公里真实驾驶场景数据积累。
截至目前,MAXIEYE已累计完成数十款TOP品牌主力车型智能驾驶系统量产交付,包括但不限于广汽埃安S、广汽埃安S MAX、广汽传祺GS8、广汽传祺ES9、广汽传祺E8、昊铂GT、昊铂HT、哪吒V、合创V09、合创Z03、合创A06等车型,以用户“用得起、愿意用”的核心理念成功渗透5-25万元乘用车主流市场。