微信公众号 | strongerHuang
年前12月份的时候,FreeRTOS 升级到V11.0版本,你们项目用上了这个最新版本吗?

我最近抽时间,把老项目中V10版本的FreeRTOS,升级(替换)为最新V11.0.1版本,发现编译没有错误,然后也实际在产品上跑了一下,没发现什么问题。
这说明,V10和V11版本还是兼容,至少用到的这些API接口上没问题。
当然,我只是简单跑了一下,没有经过严格测试。还有,项目中用到的接口都是一些常规的,而且只是占据少部分。
V11和V10的接口是否全面兼容,还有有待验证,只能说常规的接口是向下兼容,且增加了一些更现代、更先进的API接口。
重要的更新内容
FreeRTOS从V10升级到V11,从官网给出的信息,升级的内容非常多,有30条左右,下面给大家列举一些重要的更新内容:
1、支持对称多处理 (SMP)
FreeRTOS 在 2017 年推出了对非对称多处理 (AMP) 的支持,而V11版本的 FreeRTOS 首次将对称多处理 (SMP) 支持纳入主线版本。借助 SMP, FreeRTOS 内核的实例可以在多个相同的处理器核心中调度任务。
2、合规性检查从 PC Lint 切换到 Coverity
FreeRTOS源代码遵循 MISRA 行业规范,此次升级,将规范从 MISRA C:2004 更新了 MISRA C:2012,代码静态分析工具也切换到了Coverity.
这里简单可以一下什么是 MISRA 行业规范:MISRA C是由汽车产业软件可靠性协会(MISRA)提出的C语言开发标准。
其目的是在增进嵌入式系统的安全性及可移植性,针对C++语言也有对应的标准MISRA C++。
这里可以参看我分享的文章:汽车行业 C 语言标准:MISRA C

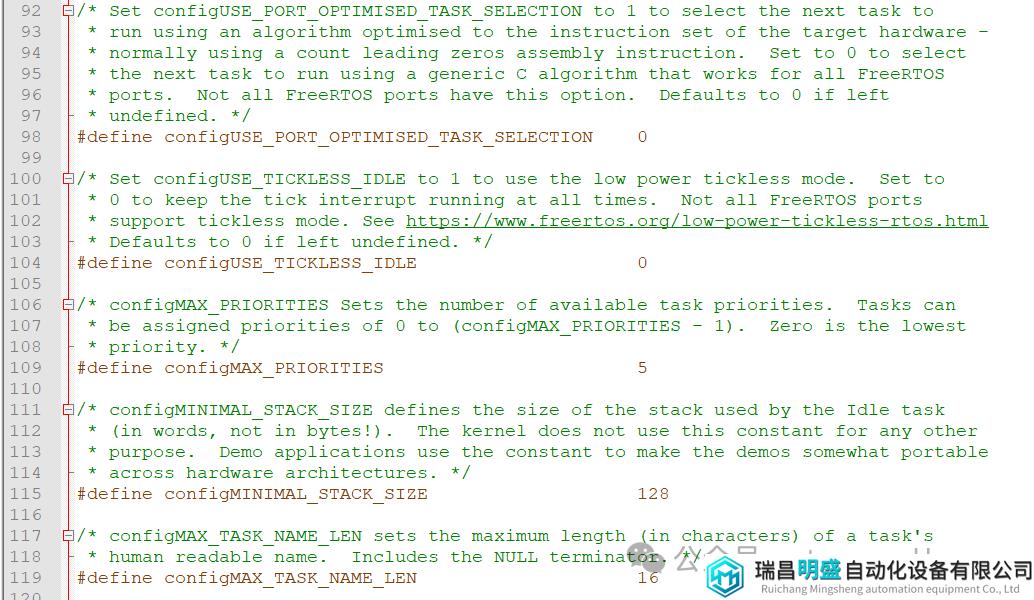
3、增加FreeRTOSConfig.h说明(注释)
就是增加了FreeRTOSConfig.h配置文件的注释,比以前更加详细了。
4、增加内存安全检查
在heap_4.c和heap5 .c中增加了对内部堆块指针的边界检查和混淆,以帮助捕获指针异常。
比如 pvPortMalloc :

5、增加一些API接口
抛开新支持的一些功能之外,也增加了一些实用的API接口,比如:uxTaskBasePriorityGet 和 uxTaskBasePriorityGetFromISR 来获取任务最后分配的基本优先级。
还添加了“跟踪宏”,支持跟踪所有api的输入和退出。
6、更新/修复一些功能
更新并修改一些功能和潜在的bug,比如:更新Cortex-M端口的中断优先级断言,使它们不会在没有实现PRIO位的QEMU上触发。
再比如:更新eTaskGetState和uxTaskGetSystemState,对于等待就绪的任务返回eReady.
还有:更新ARMv7-M端口以确保内核中断以最低优先级运行。
时间有限,就整理这么多,详细更新说明,大家可以参看:https://github.com/FreeRTOS/FreeRTOS-Kernel/blob/main/History.txt
最后,如果大家升级到V11有遇到各种问题,欢迎留言交流和讨论。