前文介绍了电子设备振动环境试验的一些基本概念和分类,以及相关软硬件系统。
电子设备振动环境试验(1) —— 概述
电子设备振动环境试验(2) —— 振动环境试验类型
电子设备振动环境试验(3) ——振动台试验系统
电子设备振动环境试验(4) ——数据采集系统
本文将开始介绍具体的振动环境试验,首先介绍最常见的振动类型——正弦振动和扫频。
正弦振动
正弦振动试验主要目的是模拟产品在运输、存储和使用等过程中经受到的正弦振动。通常正弦振动主要由汽车的发动机、空调压缩机、飞机的桨叶和气动等旋转、脉动、振荡引起。
而现实中的振动通常是随机的,随着试验技术的发展,随机振动的应用已越来越广泛。但是由于多方面的原因,正弦振动试验在各行各业仍然广泛被采用,其原因主要包括:
通过正弦振动试验,可有效获取系统的动力学特性;
可模拟环境振动,测试系统在正弦激励下的承载能力;
历史原因,包括之前设计和使用规范的继承,试验设备和新规范的更新需要较长的周期等。
总而言之,尽管正弦振动试验对产品的验证是不充分和不全面的,但是正弦振动在可见的未来是不会被取代的;而一些以正弦试验为主的行业,可能在未来会有更多形式的试验作为补充。
正弦振动和仿真分析里的谐响应分析对标。
结构动力学中的谐响应分析(1) —— 谐响应分析原理及应用
结构动力学中的谐响应分析(2) —— 基于ANSYS的实现
正弦振动的描述
正弦振动通过频率、振幅、相位可以完全描述,而对于我们只关心稳态过程,相位信息是不需要的。
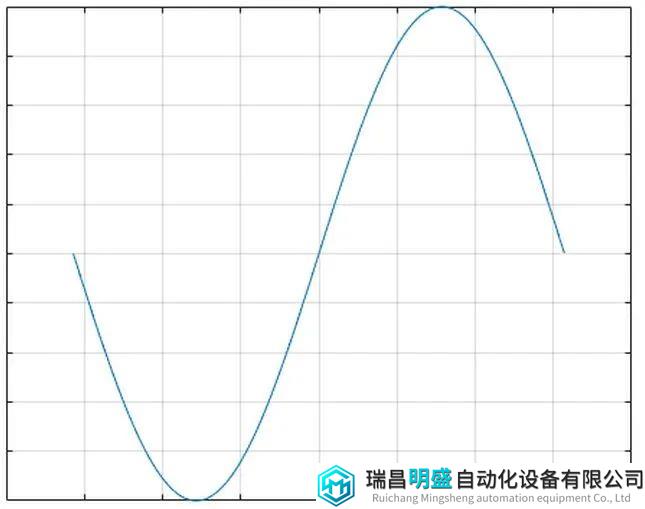
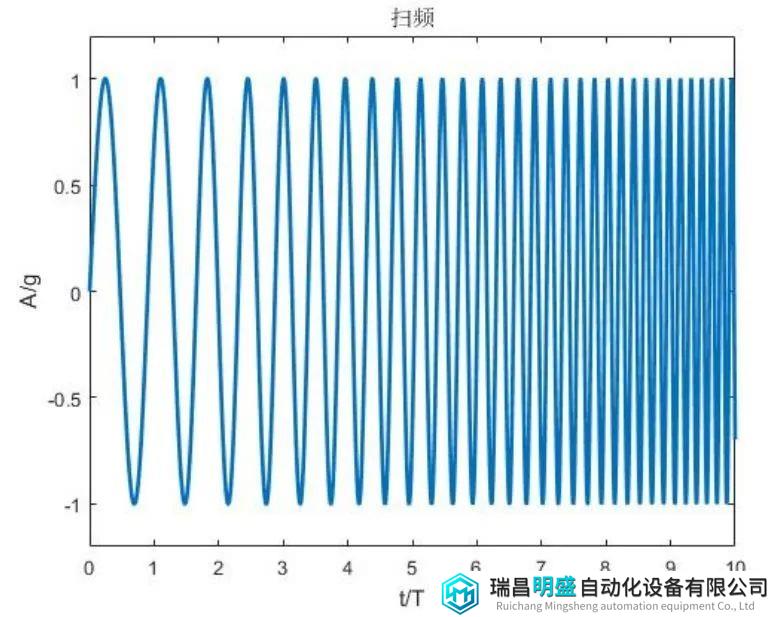
而事实上,正弦试验需要对连续频率进行试验;对于无穷多个频率进行试验是不可能实现的;此外,对于成百上千个正弦频率激励一个个试验也会花费过多的时间。实际的正弦试验大多数采用扫频的技术,即正弦激励每个时刻频率都在变化;这种正弦试验还引入了试验时间,或者扫描速率这个概念;其时域上的曲线大致是这种形式。
在频域上,有等幅值的,也有不等幅值的;由于振动台的限制,通常低频由位移控制,高频由加速度控制。
正弦振动试验参数
正弦振动试验中,需要确定频率范围、不同频率下的振幅和扫描速率(与试验时间等同)。
频率范围和振幅都比较容易理解,这里简单介绍一下扫描速率。扫描一般分为频率线性速率和对数速率2种形式;线性速率大约类似x Hz/min这种形式,不过多做介绍;对数速率通常用倍频程描述;对于频率范围比较广的正弦试验,大多数采用对数速率。
很多设计师在正弦试验的时候,对倍频程这个概念很困惑,这里简单介绍一下倍频程的定义。

式中f1为当前频率,f0为基准频率,n就为倍频程;由此可见,f1和f0之间并不是线性关系,而是和2n成线性关系,并且n可以为实数。如扫频速度为每分钟一个倍频程/分(1 oct/min),表示每分钟频率增加一倍;x oct/min,表示每分钟频率增加2x倍。扫描速率和试验时间是一个等价的概念,有关这些参数的计算,后续的系列文章将会有专门的介绍。
正弦振动试验条件
试验前,首先需要根据试验目的,确定正弦振动的试验类型,通常包括:
特征扫频,通常采用较小量级试验,目的是为了获取系统的动力学特性;
常规正弦试验,根据产品经受的极端环境,开展极限承载能力的试验;
定频试验,在产品共振点进行一定时间的耐振试验,考核产品抗共振能力;
确认是在哪个阶段开展的试验,包括研制试验、鉴定试验、验收试验和准鉴定试验等。
正弦试验需要确定频率范围、振幅、扫描速率;扫频是频率从高到低还是从低到高扫描,以及扫频的次数等。其中,扫频速率不仅影响试验的时间长短,还会导致扫出的共振频率有略微的偏移。
理想的试验曲线一般是一条或几条折线描述,而实际试验过程的控制曲线常常是这样的。

由于振动台控制能力不是无限的,在系统共振点可能会出现一定波动;在振动台介绍的那篇系列文章中,我们讨论到,“通常对于给定的振动谱,会设置一个容差限,其上下限作为允许的偏差,叫做上下报警限;原则上,认为试验过程中,超出报警限的振动激励是不符合试验要求的;但是通常并不会要求的那么严格。”
此外,试验过程中,由于各方面的原因,可能还会采取下凹(也有叫做带谷)、限幅等措施;其曲线大致是这样的,其中画红圈的就是下凹的区间和幅度。

有关下凹和限幅等讨论,将在后续系列文章一并开展。
最后
本文介绍了振动环境试验中最常见的类型——正弦振动和扫频,下文将对随机振动开展介绍。